Faster R-CNN
论文原标题: Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Network
本人对此方向什么都不会,边读边学,读个大概。
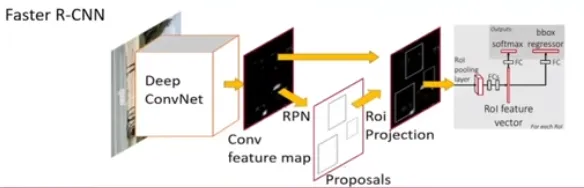
该论文从 Fast R-CNN1的基础上进一步加速得来。论文提出使用 CNN 实现 Region proposals 的过程,并起名为 Region Proposal Networks(RPNs)。同时它可以与 Fast R-CNN 共享卷积层,避免了对特征的重复提取。
RPNs
RPNs 将图片作为输出,输出矩形选择框(即 Region proposals)。为了产生 region proposals,作者在卷积层的输出上滑动一个小的网络,它的输入是在特征图上的 的空间窗口。
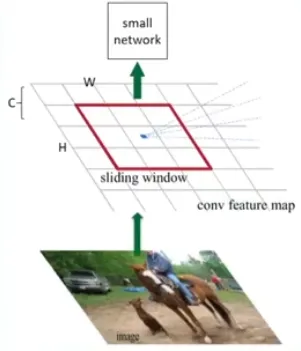
该网络将输入映射到一个低维的特征上,并传给两个并行的全连接层,一个用于框回归(box-regression),另一个用于分类(box-classification)。
RPN产生的位置不一定精确,所以需要 box-regression 的分支计算包含结果的概率。
Anchor
即参考框。从区域中产生的候选框不是凭空产生的,所以预先定义了 个参考框,每个框负责预测与其形状相似候选框。anchor 的最后输出的是每个参考框的偏移量。在每一个位置,作者采用了 3 种尺度(, , ),每个尺度3种比例(, , ),共9种大小的 Anchor。这 9 个 Anchor 一般足以覆盖常见的预测目标2。
Anchor 的大小与目标候选框的大小越匹配,最终结果就越好3。像这样使用多个 Anchor 进行滑动的方法又称为多尺度(multi-scale)、平移不变(translation-invariant) 的 Anchor。
RPN Loss 函数
损失函数一般是用来计算训练过程中目标值和预测值的偏差。Anchor 网络输出的值即预测值。目标值的定义如下:
所有的 Anchor 与标注框都会有一定的重叠,这个重叠用 Intersection-over-Union(IoU) 表示。
在训练 RPNs 时,作者对每个 anchor 分配正负标签。对以下两种情况分配正标签(positive label):
- 与标注框的 IoU 最大的 anchor,此举保证至少有一个正标签
- 与标注框的 IoU 大于 的 IoU 的 anchor
由于以上分配策略,一个标注框可能分配正标签给多个 Anchor。
若一个 anchor 对于所有的候选框的 IoU 都低于 ,分配负标签。
有了以上定义,作者确认了 RPN 网络的损失函数如下
该损失函数由两部分构成:
- 分类损失
- 回归损失
每次传入的是一个 mini-batch,这里的 就是每个 mini-batch 的索引, 表示第 个 anchor 是一个候选目标的概率值, 表示第 个 anchor 上是否为正标签,若是正标签,则为 ;若为负标签则为 。
同理,对于正标签的回归损失同样计算损失函数,如果是负标签则直接为 0。计算结果后通过 进行归一化,通过 平衡权重。
训练 RPNs
使用随机梯度下降法 (SGD)、图片中心采样。对于每个 mini-batch,先挑选单张图片。由于单个图片中包含多个正负样本的 anchor,所以只需要用一张图片就能(随机)采集到 256 个样本用于训练。由于在图片中,大多数是负样本,所以在采样时要保证正负样本的比例为 。
在训练时,有 3 种方式:交替训练、近似联合训练和非近似联合训练
交替训练 Alternating training
在此方案中,作者首先训练了一个 RPN,然后使用它产生的 proposals 来训练 Fast R-CNN 网络。Fast R-CNN 产生的权重又能拿来训练 RPN。重复迭代此过程完成训练
4 步交替训练 4-Step Alternating training
此文章采用该方式完成训练。在该中方式中分为四步(粉色代表未固定的网络):
-
首先训练一个 RPN 网络。
-
由于这个 RPN 能产生候选区域,在接下来使用 RPN 训练 Fast R-CNN 网络。
-
随后使用 Fast R-CNN 网络来初始化 RPN 训练,在此过程中固定了共享的卷积层,只微调 RPN
-
冻结共享的卷积层,只微调 Fast R-CNN
近似联合训练 Approximate joint training
在训练的一开始就是训练整张网络,在训练时会有两个损失,直接反向传播回去。
作者后来发现近似联合训练能产生相似的结果,同时训练时间减少了 。
但是这个方式忽略了一个问题:候选框的偏导数。即RPN得到了坐标后传给分类网络使用,获得损失后无法传回。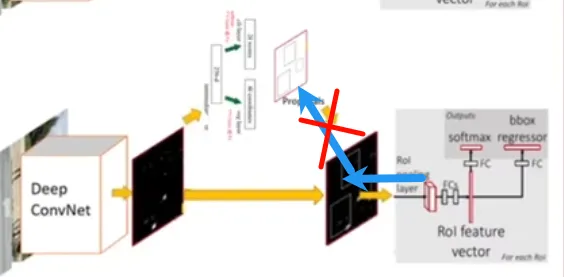 [^4]
[^4]
非近似联合训练 Non-approximate joint training
解决了方法2中无法求偏导的问题。添加了 ROI-wrap。
VOC 上实验
该论文最重要的是使用 RPNs 替换了 Region Proposal。估此处首先判断 RPNs 和传统的 Selective Search/EdgeBoxes 的对比

可以看到,虽然 proposals 的数量变少了,但是最终精度却边高了。
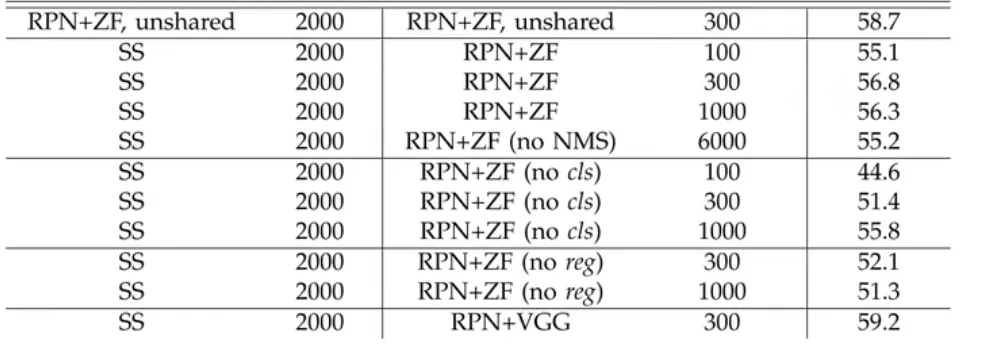
在删除 REG 后,精度也有所下降。原因是 anchor 只是大概位置,它并不是很准确。以此证明回归分支也很重要。
Footnotes
-
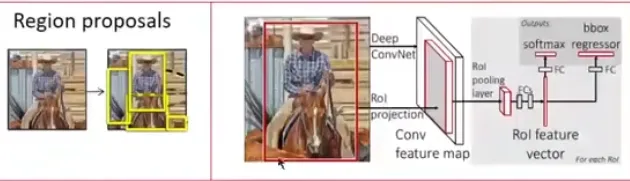
接受一整张图片,通过卷积操作得到一整张图片的特征图。然后通过 Roi 投影获得候选区域的特征图,再通过 Roi 池化层,将特征图转化为特征大小,再利用候选区域特征识别类别和精确坐标。
 Fast R-CNN 实现了几乎实时(忽略了 Region proposals)。实际上 Region proposals 采用 Selective Search 或 EdgeBoxes 操作,该操作相当耗时 ↩
Fast R-CNN 实现了几乎实时(忽略了 Region proposals)。实际上 Region proposals 采用 Selective Search 或 EdgeBoxes 操作,该操作相当耗时 ↩ -
在 COCO 数据集上,由于预测目标较小,作者又额外引入了 尺度的 Anchor ↩
-
值得一提的是,YOLO 系列并不是事先确认的候选框,而是在模型训练前事先统计好所有标注框的大小。然后通过 cluster 计算出最合适的 anchor 大小 ↩